Mirror Hand

Mechanical hand that reproduces real hand movements through a data glove input
Uma luva capturadora de movimentos usando sensores óticos de flexão e replicação dos movimentos capturados utilizando mão robótica.
Integrantes:
-
Caíque Destro (1658930) - caiquedestro@gmail.com
-
João Carlos Cardoso dos Santos (1371916) - jc.cardoso4@gmail.com
Cronograma:
Relatório Final:
Apresentação Final:
O Projeto:
Demonstração:
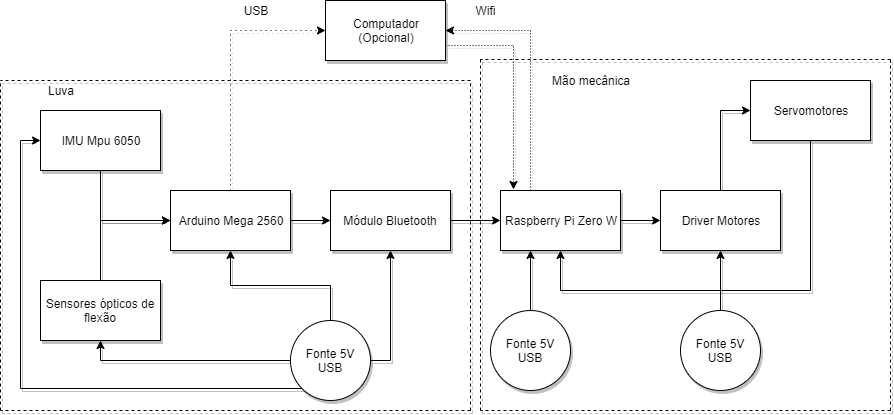
Diagrama de blocos: