Mirror Hand

Mechanical hand that reproduces real hand movements through a data glove input
Construção da mão mecânica
A construção da mão robótica será feita com impressora 3D, utilizando um modelo previsto para ser definido até a entrega 1 do projeto
O sistema de movimento será feito através de servo motores, linhas e polias. Cada dedo será controlado por 2 servo motores, um para flexionar as articulações interfalângicas com uma linha presa na parte posterior da falange distal e molas nas faces anteriores das articulações interfalângicas responsáveis pela extensão. O segundo servo motor irá realizar a extensão da articulação metacarpofalângica com uma mola responsável por sua flexão.
Alternativas caso o preço para impressão 3D seja muito caro e/ou complexo
- Construir uma mão mais simplificada com impressora 3D
- Simplificar a mão construindo as falanges com pedações maciços de algum material como madeira ou resina sem usar impressora 3D
Imagens
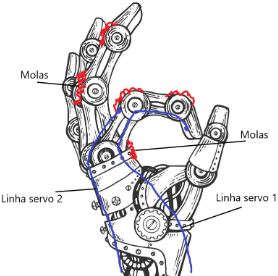
Figura 1 - Mão Robótica
 Figura 2 - Mão Robô InMoov
Figura 2 - Mão Robô InMoov
 Figura 3 - Exemplo de mão robô simplificada
Figura 3 - Exemplo de mão robô simplificada