Mirror Hand

Mechanical hand that reproduces real hand movements through a data glove input
Construção da luva
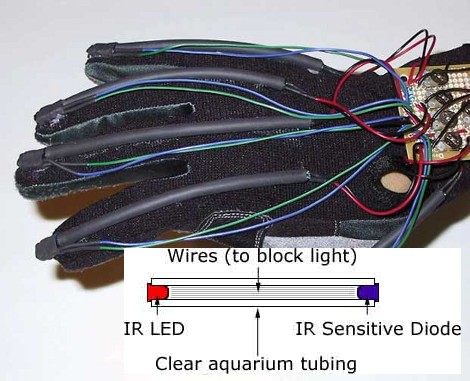
A luva será construída utilizando uma luva de EPI e o que chamamos de sensor de flexão óptica, que consiste em um tubo preto com um emissor de luz em uma extremidade e um sensor de luz em outra, ao ocorrer a dobra do tubo, menos luz do emissor alcança o sensor, o que causa um sinal que pode ser interpretado pelo microcontrolador. Além disso, será utilizado um giroscópio para leitura da rotação da mão.
Para a construção dos sensores está previsto a experimentação com diferentes tipos de sensores e materiais, com o objetivo de fazê-los da forma mais compacta e de forma que não dificulte o movimento da mão do usuário. As alternativas de sensores são:
- Um LED como emissor de luz e um LDR em um tubo preto, já tendo sido um feito um protótipo usando a capa de um fio elétrico
- Vantagem: é o modelo mais simples, já testado e robusto, com poucas chances de quebrar ou falhar
- Desvantagem: o cabo é muito grosso e dificuldade a dobra da articulação; LDR não é linear
- Testar com um tubo mais flexível
- Emissor IR e receptor IR
- Vantagem: Tamanho reduzido
- Desvantagem: Não testado ainda, não sabemos a confiabilidade do receptor IR
- Usar fibra óptica no lugar do tupo
- Falta conhecimento sobre fibra óptica, pouca chance de dar certo
Imagens de outros projetos e modelo da luva